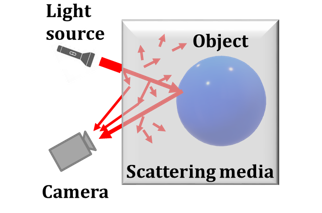
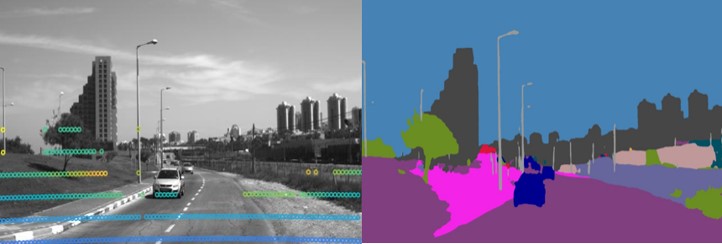
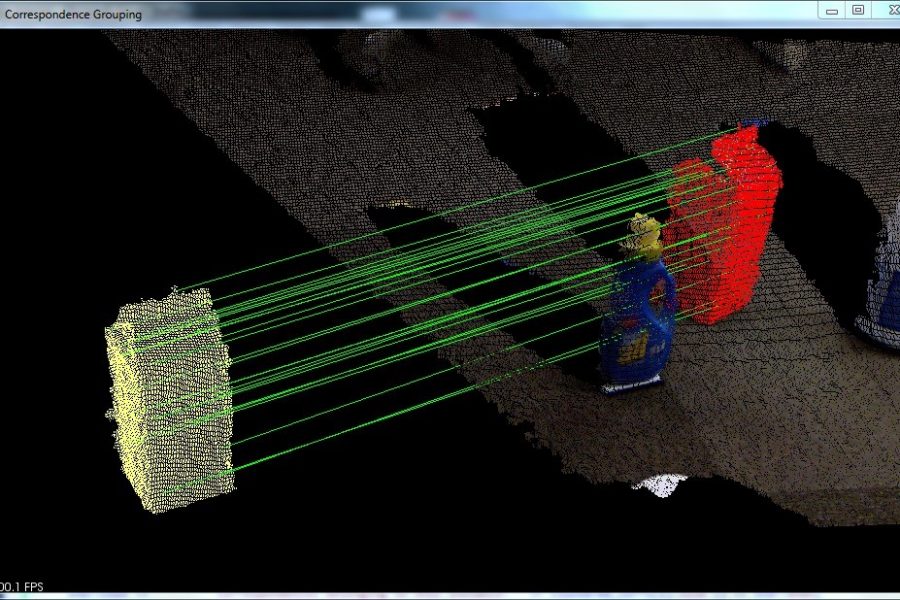
In this project we show how from a few images of the same scene we can synthesize a virtual view from a real physical scene point which is imaged by all the input cameras.
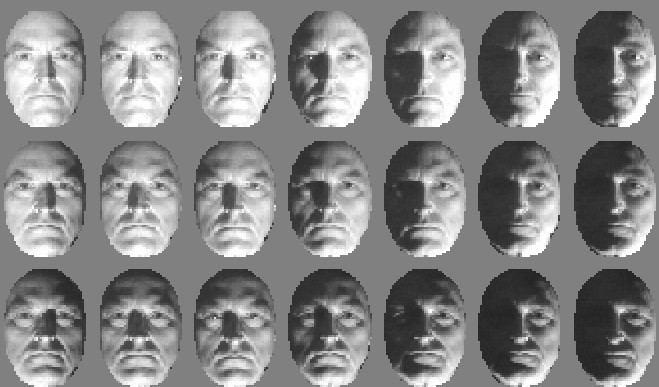
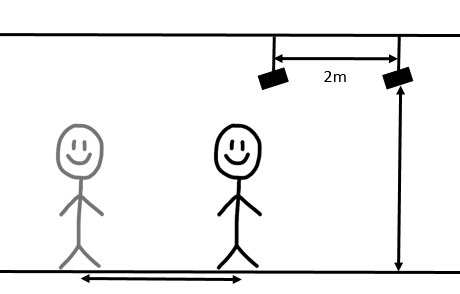
Sleep apnea Is a sleep disorder of shallow breathing or complete breathing stops that takes place during sleep and can last from few seconds to several minutes.
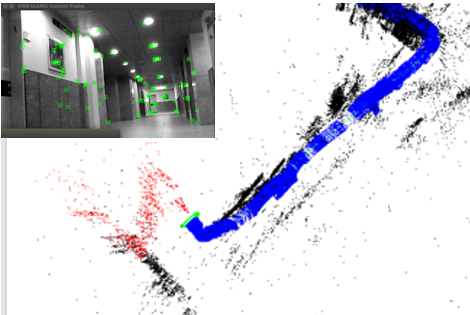
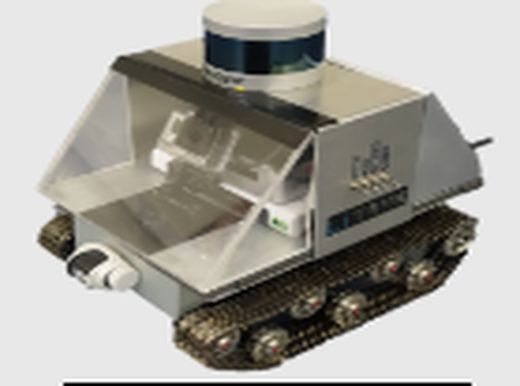
Many navigation apps and tools exists to help you navigate outdoor based mainly on GPS but a cheap and reliable indoor navigation and mapping system is missing
In our project we have implemented the PTAM (Parallel Tracking and Mapping) Algorithm on a commercial AR.Drone Quadcopter for the purposes of orientation and automatic navigation