Many navigation apps and tools exists to help you navigate outdoor based mainly on GPS but a cheap and reliable indoor navigation and mapping system is missing
In recent years drones became more accessible and we would like to explore the magnificent world of drones and autonomous systems. We would like to use the drone in order to accomplish basic mission, and create an infrastructure for next to come
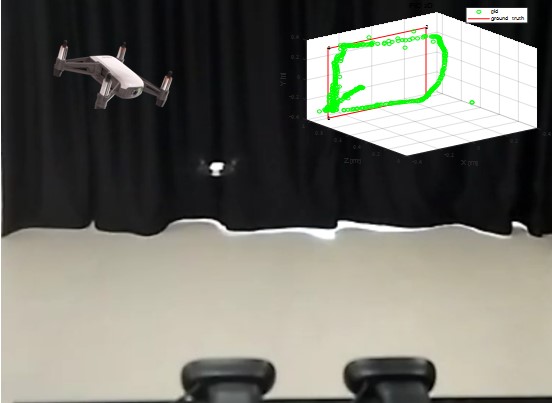
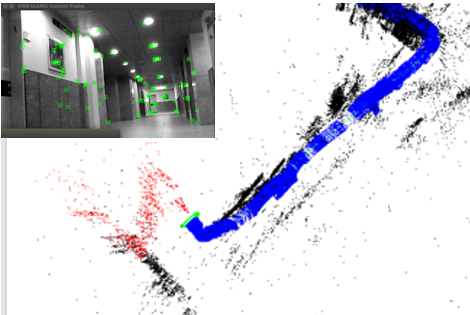
In our project we have implemented the PTAM (Parallel Tracking and Mapping) Algorithm on a commercial AR.Drone Quadcopter for the purposes of orientation and automatic navigation