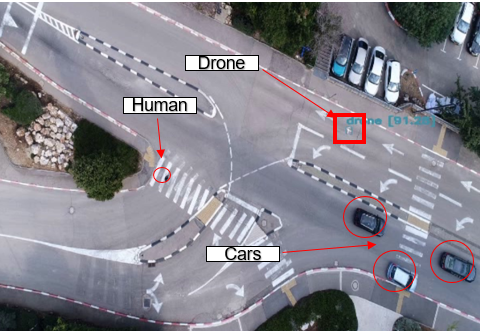
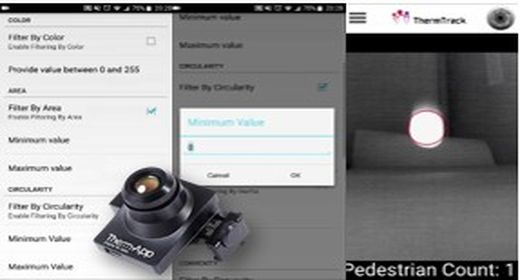
Traffic collision cost the life of hundreds per year, if you do not include the wounded. There are many roads which not contain traffic lights, despite considered dangerous for pedestrian. The main goal of this project is to develop a real-time system which warns when pedestrian approach or crossing the road, moreover we tried to implement the system on portable device in order to be stationed in junctions with no...