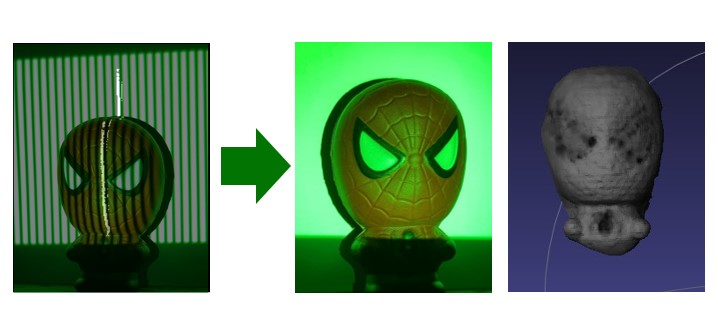
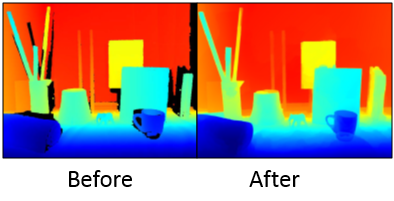
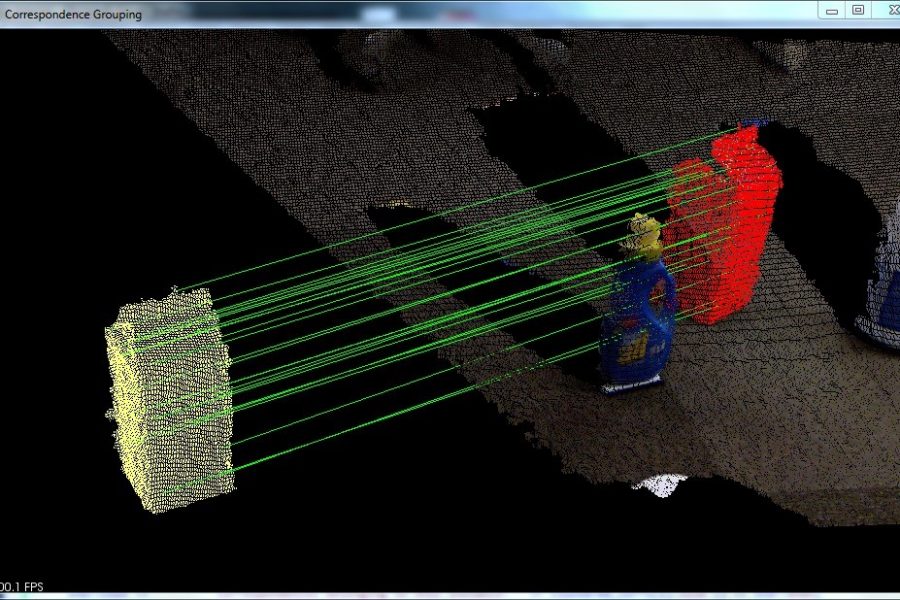
Nowadays, depth cameras (e.g. Kinect), are capable to map the entire room. It is doing so, by generating point clouds (x,y,z) of the object, in front of them. But it still maps only one angle of the object in front. In order to receive 3D mapping of the object, it is necessary to picture from every angle. After all the data is received, all the angles should be transferred to...